|
An RDD network is a coupled network of discrete Dynamical Systems - each node has a state which evolves according
to determinisitic rules; firing of a node is given by a state dependent probability function. The connection structure
can be allowed to vary according to probabilistic rules (this makes the network asynchronous).
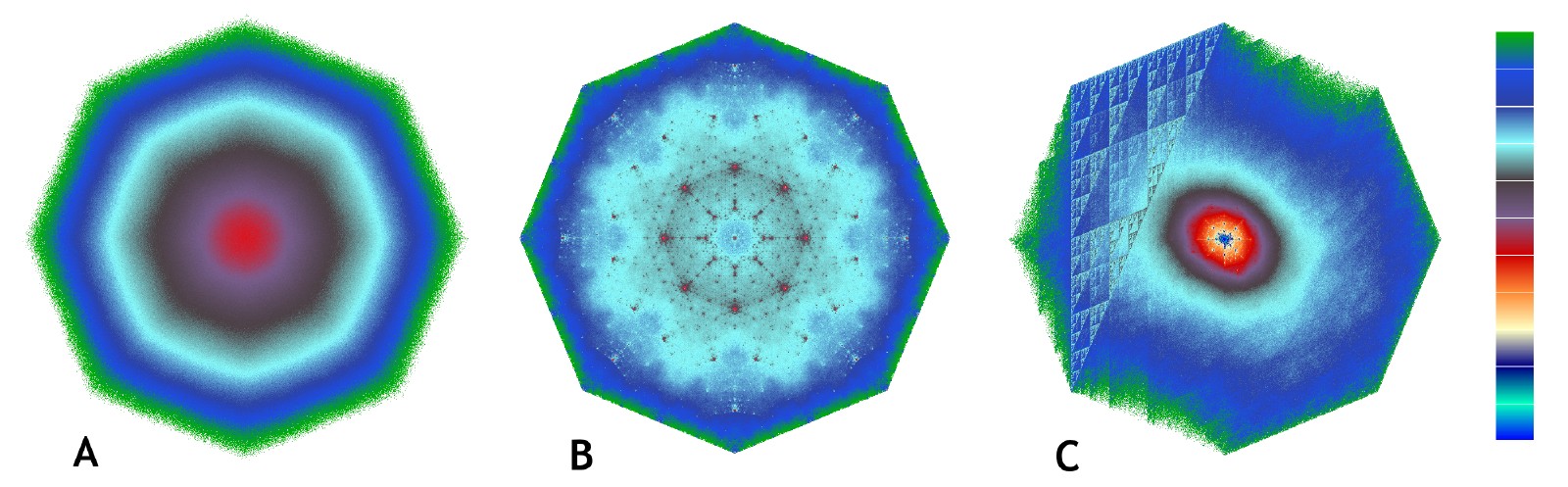
We show an example in the figure below of a visualization scheme for dynamics based on contractive cocycles.
(The color bar on the right represents density of a measure with green (at the top)
representing the lowest density. Image A is of a hybrid system with 8 nodes [mixed deterministic and random]
with constant probabilities 0.25 of firing at each node. Since probabilities are fixed, the node state and coupling has no effect on firing probabilities.
This system may be viewed as a classical IFS with 64 contractions.
The ragged green boundary indicates the low probability of repeated single (resp. double) firings of the same node (resp. pair of adjacent nodes).
Image B is the representation of the invariant measure for an 8-node system
and uses a 'pulse' probability function. The small high density spots colored red represent dynamics where groups of nodes have
synchronized (on average). The density
of the measure on the red spots is at least 12,000 times that of the density on the boundary. Image C, which uses a 'bell' probability
function for firing, is asymmetric (even though the connection structure is 'symmetric on average'). In this case, the node states have evolved into
two synchronized clusters: one of three nodes, the other of five nodes. The vertices of the embedded Sierpinski triangle
correspond to the group of 3 synchronized nodes. Even though the node states have synchronized this does not imply the
firings have synchronized - the visualization is of the firing patterns not the node states.) Dynamically speaking, we have
intermingled basins of attraction. The stability results from the presence of an invariant subspace structure. When we break this structure,
we can obtain "cycling chaos" (see below).
Visualization tools include custom software developed by the PI (the net programs used for all the
pictures of simulations shown under networks) and the python based package
brian.
Video
- Cycling chaos movie (gif format, approximately 667MB). The movie shows cycling
between chaotic nodes of an RDD network. Nodes have synchronized into 4-4 pairs, The system is a small pertubation of the third
system described in the previous figure. The movie is a record of about 100,000,000,000 iterations (100 billion). Each frame
corresponds to a (moving) sample of 50,000,000 consecutive iterations.
email: mikefield@gmail.com
Professor Mike Field
Department of Mechanical Engineering
University of California
Santa Barbara, CA 93106
|

{kind=link}